
Following the successful workshop on the Active Vision of Humanoids that
happened in Pittsburgh, PA during the last Conference on Humanoid Robotics
(November 2007)
Practical computer vision-systems are devoted to answering a set of
practical questions, such as is there something moving independently in thevideo taken by a moving camera? What is it? Is there a human in the image?
Who is he? On the other hand, humans are involved in an ongoing process of
analyzing images. As Stuart Geman wrote, "real world images have essentiallyinfinite detail which can be perceived only by a process that is itself
ongoing and essentially infinite. The more you look, the more you see".
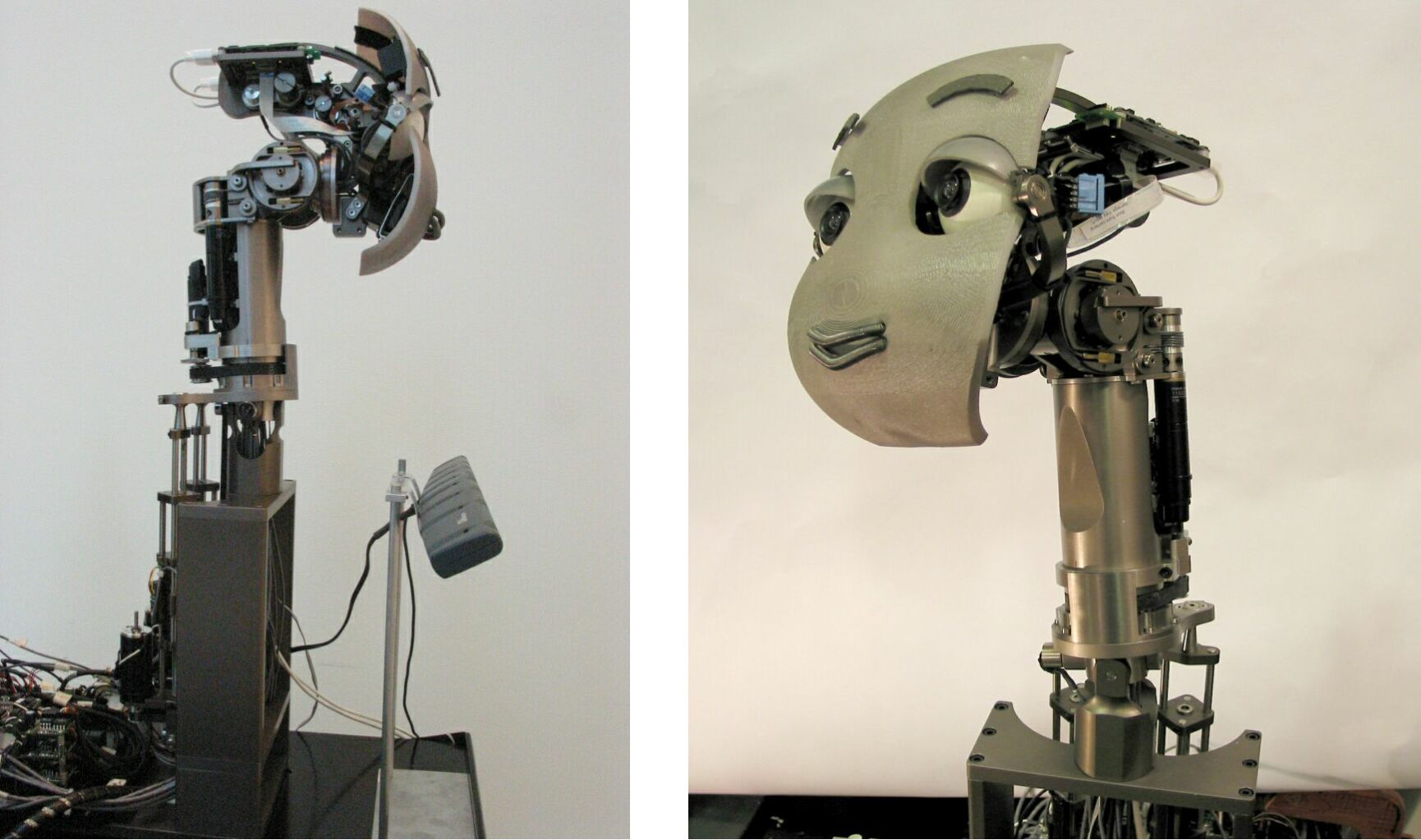
Considering a humanoid robot, how should we think about its vision? The way
we think of a practical vision system or the way we think of human vision?
Papers are solicited that keep some focus on the question of the
visual/motor architecture of the humanoid: how should its motion system be
structured? Should it stabilize the images? Segment the scene into surfaces?
Constantly check where it is with regard to its knowledge of the world? How
should it build models of objects? How should it integrate cue information?
How should it reach a decision?
What is its perception of spatial layout? How should it learn, and what
should it learn? Is there software that we have today which can be used to
provide humanoids with a basic visual front-end, and what would this be?
Should we be developing visuo-motor representations?
How could we build them and how could we use them?
Many of the questions raised above are addressed in contemporary computer
vision, but from the perspective of graphics and multimedia, image editing
and image databases. Existing approaches do not apply to the case of a
real-time system moving the way humans do. The peculiarity of humanoid
vision stems from its purpose of supporting the action of an anthropomorphic
body (with hands and legs) as opposed to "just" being pattern recognition
or image understanding.
Thus, in some sense, the humanoid active vision envisioned for this special
issue, constitutes an evolution from the Active Vision of the 90's to the
"Action Vision" of the new millennium. Action Vision considers the motor
system of the humanoid as an integral part of its perceptual machinery.
Papers addressing such topics or others relevant to the design of a
humanoid's vision system, should be submitted before the end of November for
a target publication date of early 2009.
Source : http://publications.csail.mit.edu
0 Command:
Posting Komentar